Erica WengI received my PhD from the Robotics Institute, part of the School of Computer Science at Carnegie Mellon University, where I worked on human trajectory forecasting with Professor Kris Kitani. My research centers on perception and prediction for autonomous robots, including autonomous vehicles and social robotics. I received my BS and MEng in Course 6 (Computer Science) from MIT, where I was a research assistant for Leslie Kaelbling in the Learning and Intelligent Systems group. My research was supported by the Ford Foundation Fellowship Program (2022-2025). Email / GitHub / Google Scholar / LinkedIn |
|
Research |
|
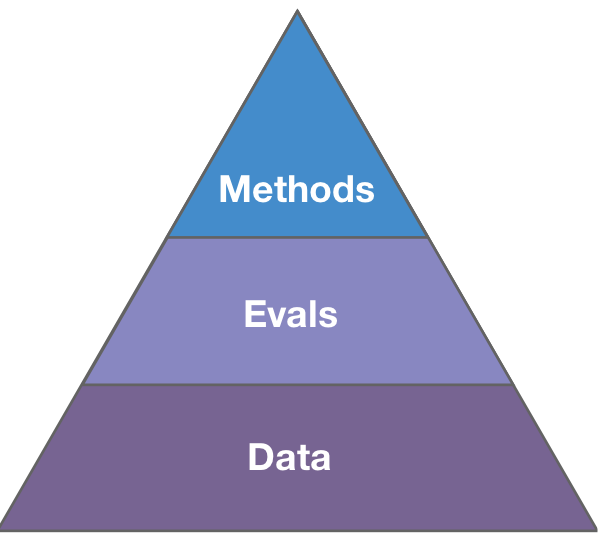
A Layered Foundation for Reliable Trajectory Forecasting: Data, Evaluation, and MethodsErica Weng PhD Thesis, Carnegie Mellon University, School of Computer Science, Robotics Institute, February 2026 This thesis argues that reliable trajectory forecasting requires treating data curation, evaluation design, and modeling as co-equal engineering challenges, organized as a layered stack where each layer depends on the soundness of those below it. |

|
Humanity's Last ExamLong Phan, ..., Erica Weng, ..., Dan Hendrycks Nature, 2025 arxiv A multi-modal benchmark of 2,500 expert-level questions across dozens of subjects at the frontier of human knowledge. (Contributed 1 question.) |

|
Evaluating a VR System for Collecting Safety-Critical Vehicle-Pedestrian InteractionsErica Weng, Kenta Mukoya, Deva Ramanan, Kris Kitani Robotics: Science and Systems (RSS) 2024: Workshop on Data Generation for Robotics (Spotlight) arxiv / project page A user study evaluation of a virtual reality (VR) system for collecting safety-critical vehicle-pedestrian interaction data shows high perception of realism and user immersion as well as high similarity of data collected in the VR system to that collected in the real-world. |

|
JaywalkerVR: A VR System for Collecting Safety-Critical Pedestrian-Vehicle InteractionsKenta Mukoya, Erica Weng, Rohan Choudhury, Kris Kitani International Conference on Robotics and Automation (ICRA) 2024 arxiv / slides A virtual reality (VR) system based on the HTC VIVE VR headset system for collecting safety-critical vehicle-pedestrian interaction data that is difficult to collect and rare to find in the real world. |
|
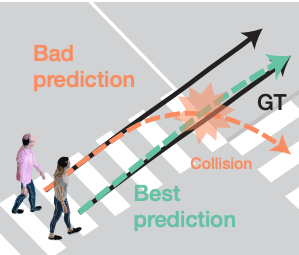
Joint Metrics Matter: A Better Standard for Trajectory ForecastingErica Weng, Hana Hoshino, Deva Ramanan, Kris Kitani International Conference on Computer Vision (ICCV) 2023 arxiv / code / poster / video A comprehensive evaluation of baselines with respect to multi-agent multimodal metrics (Joint ADE / FDE) and a general optimization method for improving Joint ADE / FDE. |

|
Fast Neural Relational Inference with Modular Meta-LearningFerran Alet, Erica Weng, Leslie Kaelbling, Tomas Lozano-Perez Neural Information Processing Systems (NeurIPS) 2019 arxiv / code An application of the Modular Meta-Learning algorithm to the problem of Neural Relational Inference outperforms previous non-modular deep learning methods. |
|
Thanks to Leo for his cool website template. |