Erica WengI am a PhD student at the Robotics Institute, part of the School of Computer Science at Carnegie Mellon University, where I work on human trajectory forecasting with Professor Kris Kitani. My research centers on perception and prediction for autonomous robots, including autonomous vehicles and social robotics. I received my BS and MEng in Course 6 (Computer Science) from MIT, where I was a research assistant for Leslie Kaelbling in the Learning and Intelligent Systems group. My research is supported by the Ford Foundation Fellowship Program (2022-2025). Email / GitHub / Google Scholar / LinkedIn |
|
Research |

|
Evaluating a VR System for Collecting Safety-Critical Vehicle-Pedestrian InteractionsErica Weng, Kenta Mukoya, Deva Ramanan, Kris Kitani Robotics: Science and Systems (RSS) 2024: Workshop on Data Generation for Robotics (Spotlight) arxiv / project page A user study evaluation of a virtual reality (VR) system for collecting safety-critical vehicle-pedestrian interaction data shows high perception of realism and user immersion as well as high similarity of data collected in the VR system to that collected in the real-world. |

|
JaywalkerVR: A VR System for Collecting Safety-Critical Pedestrian-Vehicle InteractionsKenta Mukoya, Erica Weng, Rohan Choudhury, Kris Kitani International Conference on Robotics and Automation (ICRA) 2024 arxiv / slides A virtual reality (VR) system based on the HTC VIVE VR headset system for collecting safety-critical vehicle-pedestrian interaction data that is difficult to collect and rare to find in the real world. |
|
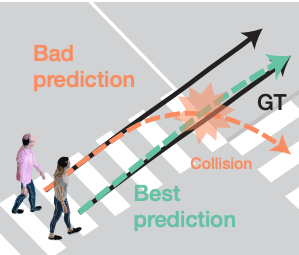
Joint Metrics Matter: A Better Standard for Trajectory ForecastingErica Weng, Hana Hoshino, Deva Ramanan, Kris Kitani International Conference on Computer Vision (ICCV) 2023 arxiv / code / poster / video A comprehensive evaluation of baselines with respect to multi-agent multimodal metrics (Joint ADE / FDE) and a general optimization method for improving Joint ADE / FDE. |

|
Fast Neural Relational Inference with Modular Meta-LearningFerran Alet, Erica Weng, Leslie Kaelbling, Tomas Lozano-Perez Neural Information Processing Systems (NeurIPS) 2019 arxiv / code An application of the Modular Meta-Learning algorithm to the problem of Neural Relational Inference outperforms previous non-modular deep learning methods. |
|
Thanks to Leo for his cool website template. |